
In the previous topic” Classification
of Electric Motors - Part Two “, I explained the Brushless DC motor (BLDC) and the first type of single phase, Squirrel Cage, Induction Motor; Shaded-Pole Induction Motors.
Today, I will explain other types of Squirrel Cage Induction Motors plus types of Wound rotor, induction motors as follows.
You can review the following related topics for review and good following.
Today, I will explain other types of Squirrel Cage Induction Motors plus types of Wound rotor, induction motors as follows.
You can review the following related topics for review and good following.
1- Single Phase, Squirrel Cage, Induction Motor:
This category have many types as shown in the below image.

B- Split-Phase AC Induction Motor
Construction and operation principle:
The split-phase motor is also known as an induction start/induction run motor. It has two windings: a start and a main winding. The start winding is made with smaller gauge wire and fewer turns, relative to the main winding to create more resistance, thus putting the start winding’s field at a different angle than that of the main winding which causes the motor to start rotating. The main winding, which is of a heavier wire, keeps the motor running the rest of the time.
Advantages and disadvantages:
- The starting torque is low, typically 100% to 175% of the rated torque.
- The motor draws high starting current, approximately 700% to 1,000% of the rated current.
- The maximum generated torque ranges from 250% to 350% of the rated torque.
Applications:
Good applications for split-phase motors include small grinders, small fans and blowers and other low starting torque applications with power needs from 1/20 to 1/3 hp. Avoid using this type of motor in any applications requiring high on/off cycle rates or high torque.
Types:
Split-phase motors are designed to use inductance, capacitance, or resistance to develop a starting torque and so, they have many types as follows:
- Capacitor-Start.
- Permanent Split Capacitor (Capacitor Run) AC Induction Motor.
- Capacitor Start/Capacitor Run AC Induction Motor.
- Resistance-Start.
1- Capacitor-Start
Construction and operation principle:
 |
Capacitor-Start Split-Phase AC Induction Motor |
The stator consists of the main winding and a starting winding (auxiliary). The starting winding is connected in parallel with the main winding and is placed physically at right angles to it. A 90-degree electrical phase difference between the two windings is obtained by connecting the auxiliary winding in series with a capacitor and starting switch.
When the motor is first energized, the starting switch is closed. This places the capacitor in series with the auxiliary winding. The capacitor is of such value that the auxiliary circuit is effectively a resistive-capacitive circuit (referred to as capacitive reactance and expressed as XC). In this circuit the current leads the line voltage by about 45º(because X C about equals R). The main winding has enough resistance-inductance (referred to as inductive reactance and expressed as XL) to cause the current to lag the line voltage by about 45º(because X L about equals R). The currents in each winding are therefore 90ºout of phase - so are the magnetic fields that are generated. The effect is that the two windings act like a two-phase stator and produce the rotating field required to start the motor.
When nearly full speed is obtained (75% of Rated speed), a centrifugal device (the starting switch) cuts out the starting winding. The motor then runs as a plain single-phase induction motor. Since the auxiliary winding is only a light winding, the motor does not develop sufficient torque to start heavy loads. Split-phase motors, therefore, come only in small sizes.
Advantages and disadvantages:
2- Permanent Split Capacitor (Capacitor Run) AC Induction Motor
When the motor is first energized, the starting switch is closed. This places the capacitor in series with the auxiliary winding. The capacitor is of such value that the auxiliary circuit is effectively a resistive-capacitive circuit (referred to as capacitive reactance and expressed as XC). In this circuit the current leads the line voltage by about 45º(because X C about equals R). The main winding has enough resistance-inductance (referred to as inductive reactance and expressed as XL) to cause the current to lag the line voltage by about 45º(because X L about equals R). The currents in each winding are therefore 90ºout of phase - so are the magnetic fields that are generated. The effect is that the two windings act like a two-phase stator and produce the rotating field required to start the motor.
When nearly full speed is obtained (75% of Rated speed), a centrifugal device (the starting switch) cuts out the starting winding. The motor then runs as a plain single-phase induction motor. Since the auxiliary winding is only a light winding, the motor does not develop sufficient torque to start heavy loads. Split-phase motors, therefore, come only in small sizes.
Advantages and disadvantages:
- Since the capacitor is in series with the start circuit, it creates more starting torque, typically 200% to 400% of the rated torque.
- The starting current, usually 450% to 575% of the rated current, is much lower than the split-phase due to the larger wire in the start circuit.
- Sizes range from fractional to 10 hp at 900 to 3600 rpm.
2- Permanent Split Capacitor (Capacitor Run) AC Induction Motor
Construction and operation principle:
 |
| Permanent Split Capacitor (Capacitor Run) AC Induction Motor |
A permanent split capacitor (PSC) motor has a run type capacitor permanently connected in series with the start winding. This makes the start winding an auxiliary winding once the motor reaches the running speed.
Since the run capacitor must be designed for continuous use, it cannot provide the starting boost of a starting capacitor.
The typical starting torque of the PSC motor is low, from 30% to 150% of the rated torque.
PSC motors have low starting current, usually less than 200% of the rated current, making them excellent for applications with high on/off cycle rates.
Advantages
- The motor design can easily be altered for use with speed controllers.
- They can also be designed for optimum efficiency and High-Power Factor (PF) at the rated load.
- They’re considered to be the most reliable of the single-phase motors, mainly because no centrifugal starting switch is required.
Applications
Permanent split-capacitor motors have a wide variety of applications depending on the design. These include fans, blowers with low starting torque needs and intermittent cycling uses, such as adjusting mechanisms, gate operators and garage door openers.
3- Capacitor Start/Capacitor Run AC Induction Motor
Construction and operation principle:
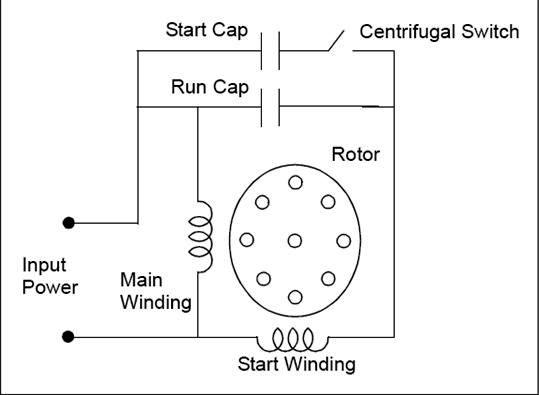 |
| Capacitor Start/Capacitor Run Split-Phase AC Induction Motor |
This motor has a start type capacitor in series with the auxiliary winding like the capacitor start motor for high starting torque. Like a PSC motor, it also has a run type capacitor that is in series with the auxiliary winding after the start capacitor is switched out of the circuit. This allows high overload torque.
Advantages
- This type of motor can be designed for lower full-load currents and higher efficiency
Disadvantages
- This motor is costly due to start and run capacitors and centrifugal switch.
Applications
It is able to handle applications too demanding for any other kind of single-phase motor. These include woodworking machinery, air compressors, high-pressure water pumps, vacuum pumps and other high torque applications requiring 1 to 10 hp.
4- Resistance-Start
Construction and operation principle:
 |
| Resistance-Start Split-Phase AC Induction Motor |
A modified version of the capacitor start motor is the resistance start motor. In this motor type, the starting capacitor is replaced by a resistor. This motor also has a starting winding in addition to the main winding. It is switched in and out of the circuit just as it was in the capacitor-start motor. The starting winding is positioned at right angles to the main winding. The electrical phase shift between the currents in the two windings is obtained by making the impedance of the windings unequal. The main winding has a high inductance and a low resistance. The current, therefore, lags the voltage by a large angle. The starting winding is designed to have a fairly low inductance and a high resistance. Here the current lags the voltage by a smaller angle.
For example, suppose the current in the main winding lags the voltage by 70º. The current in the auxiliary winding lags the voltage by 40º. The currents are, therefore, out of phase by 30º. The magnetic fields are out of phase by the same amount. Although the ideal angular phase difference is 90º for maximum starting torque, the 30-degree phase difference still generates a rotating field. This supplies enough torque to start the motor. When the motor comes up to speed, a speed-controlled switch disconnects the starting winding from the line, and the motor continues to run as an induction motor. The starting torque is not as great as it is in the capacitor-start.
Applications, Advantages and disadvantages:
The resistance start motor is used in applications where the starting torque requirement is less than that provided by the capacitor start motor. Apart from the cost, this motor does not offer any major advantage over the capacitor start motor.
A comparison for the popular types of a split phase motors is shown in the below image.

C- Universal motor:
 |
| Universal motor |
Universal motors are mostly operated on AC power, but they can operate on either AC or DC. Tools and appliances are among the most frequent applications.
Almost 90% of the three-phase AC Induction motors are of Squirrel Cage type. Here, the rotor is of the squirrel cage type and it works as explained earlier. The power ratings range from one-third to several hundred horsepower in the three-phase motors. Motors of this type rated one horsepower or larger, cost less and can start heavier loads than their single-phase counterparts.
Three phase Squirrel cage Induction motors are classified by application with a design letter which gives an indication of key performance characteristics of the motor, these classification are made by NEMA and IEC. The main Classifications of Three phase Squirrel cage Induction motors are shown in the below image.
3- Single Phase, Wound Rotor, Induction Motor
This category have many types as shown in the below image.
A- Repulsion motor
Please review the previous topic “Classification
of Electric Motors – Part One” for more information about Universal motor.
2- Three Phase, Squirrel Cage, Induction Motor:
Almost 90% of the three-phase AC Induction motors are of Squirrel Cage type. Here, the rotor is of the squirrel cage type and it works as explained earlier. The power ratings range from one-third to several hundred horsepower in the three-phase motors. Motors of this type rated one horsepower or larger, cost less and can start heavier loads than their single-phase counterparts.
Three phase Squirrel cage Induction motors are classified by application with a design letter which gives an indication of key performance characteristics of the motor, these classification are made by NEMA and IEC. The main Classifications of Three phase Squirrel cage Induction motors are shown in the below image.
 |
| Three Phase, Squirrel Cage, Induction Motor |
3- Single Phase, Wound Rotor, Induction Motor
This category have many types as shown in the below image.
A- Repulsion motor
Construction:
 |
| Repulsion motor |
The motor has a stator and a rotor but there is no electrical connection between the two and the rotor current is generated by induction. The rotor winding is connected to a commutator which is in contact with a pair of short-circuited brushes which can be moved to change their angular position relative to an imaginary line drawn through the axis of the stator. The motor can be started, stopped and reversed, and the speed can be varied, simply by changing the angular position of the brushes.

The principle difference between an AC series motor and repulsion motors is the way in which power is supplied to armature. In Ac series motor the armature receives voltage by conduction through the power supply. But In repulsion motors the armature is supplied by induction from the stator windings.
Disadvantages of Repulsion Motor:
Application of Repulsion motors:
The principle difference between an AC series motor and repulsion motors is the way in which power is supplied to armature. In Ac series motor the armature receives voltage by conduction through the power supply. But In repulsion motors the armature is supplied by induction from the stator windings.
Disadvantages of Repulsion Motor:
- Occurrence of sparks at brushes.
- Commutator and brushes wear out quickly. This is primarily due to arcing and heat generated at brush assembly.
- The power factor is poor at low speeds.
- No load speed is very high and dangerous.
Application of Repulsion motors:
Because of excellent starting and accelerating characteristics, repulsion-induction motors are ideal for:
- Value Operators.
- Farm Motor Applications.
- Hoists.
- Floor Maintenance Machines.
- Air Compressors.
- Laundry Equipment.
- Mining Equipment.
Types:
The various types of motors which works under the repulsion principle are:
- Repulsion-start Induction-run motor.
- Repulsion Induction motor.
A- Repulsion-start induction-run

A repulsion-start induction motor is a single phase motor having the same windings as a repulsion motor , When an induction motor drives a hard starting load like a compressor, the high starting torque of the repulsion motor may be put to use. The induction motor rotor windings are brought out to commutator segments for starting by a pair of shorted brushes. At near running speed, a centrifugal switch shorts out all commutator segments, giving the effect of a squirrel cage rotor, the brushes may also be lifted to prolong bush life. This means that they started as repulsion motors but running as induction motor Starting torque is 300% to 600% of the full speed value as compared to under 200% for a pure induction motor.
B- Repulsion-Induction Motor
A repulsion-induction motor is a form of repulsion motor which has a squirrel-cage winding in the rotor in addition to the repulsion motor winding. A motor of this type may have either a constant speed or varying-speed characteristic.
4- Three Phase, Wound Rotor, Induction Motor
 |
| Three Phase, Wound Rotor, Induction Motor |
- This type of 3-phase induction motor has high starting torque, which makes it ideal for applications where standard NEMA design motors fall short. The wound-rotor motor is particularly effective in applications where using a squirrel-cage motor may result in a starting current that's too high for the capacity of the power system.
- In addition, the wound-rotor motor is appropriate for high-inertia loads having a long acceleration time.
- The slip-ring motor or wound-rotor motor is a variation of the squirrel cage induction motor. While the stator is the same as that of the squirrel cage motor, it has a set of windings on the rotor which are not short-circuited, but are terminated to a set of slip rings. These are helpful in adding external resistors and contactors.
 |
| Wound Rotor |
- The slip necessary to generate the maximum torque (pull-out torque) is directly proportional to the rotor resistance. In the slip-ring motor, the effective rotor resistance is increased by adding external resistance through the slip rings. Thus, it is possible to get higher slip and hence, the pull-out torque at a lower speed.
- A particularly high resistance can result in the pull-out torque occurring at almost zero speed, providing a very high pull-out torque at a low starting current. As the motor accelerates, the value of the resistance can be reduced, altering the motor characteristic to suit the load requirement. Once the motor reaches the base speed, external resistors are removed from the rotor. This means that now the motor is working as the standard induction motor.
- This motor type is ideal for very high inertia loads, where it is required to generate the pull-out torque at almost zero speed and accelerate to full speed in the minimum time with minimum current draw.
Applications:
They are generally used to drive high-inertia loads (e.g., large pumps, cranes, grinders).
In the next Topic, I will continue explaining The Synchronous Motor Types. So, please keep following.
Note: these topics about Motors in this course EE-1: Beginner's electrical design course is an introduction only for beginners to know general basic information about Motors and Pumps as a type of Power loads. But in other levels of our electrical design courses, we will show and explain in detail the Motor and Pumps Loads calculations.

nice shared..very detail information
ReplyDeletegood
ReplyDelete